
I’m currently a researcher at Seed Robotics, Bytedance.
I graduated from Northeastern University with my MS degree in Robotics, concentrating in Mechanical Engineering. I got my BS degree in Mechanical Engineering at Shanghai Jiaotong University.
My research interests primarily focus on robotics. I have experience in VLA, reinforcement Learning and robotics. I also have a strong background in control theory, mechanical design, and prototyping.
🔥 News
- 2025.07: 🎉🎉 GR-3 released! A large scale VLA model that generalizes and can handle long-horizon and dexterous tasks.
- 2024.09: 🎉🎉 GR-2 released! A new state of the art generative VLA model that achieves average success rate of 97.7% across more than 100 tasks.
- 2023.06: 🎉🎉 Cyberdog2 released! The first commercial quadruped robot with ai-powered auto fall-recovery.
📝 Publications
GR-3 Technical Report
Chilam Cheang, Sijin Chen, Zhongren Cui, Yingdong Hu, Liqun Huang, Tao Kong, Hang Li, Yifeng Li, Yuxiao Liu, Xiao Ma, Hao Niu, Wenxuan Ou, Wanli Peng, Zeyu Ren, Haixin Shi, Jiawen Tian, Hongtao Wu, Xin Xiao, Yuyang Xiao, Jiafeng Xu, Yichu Yang
- GR-3 showcases exceptional capabilities in generalizing to novel objects, environments, and instructions involving abstract concepts.
- GR-3 also excels in handling long-horizon and dexterous tasks
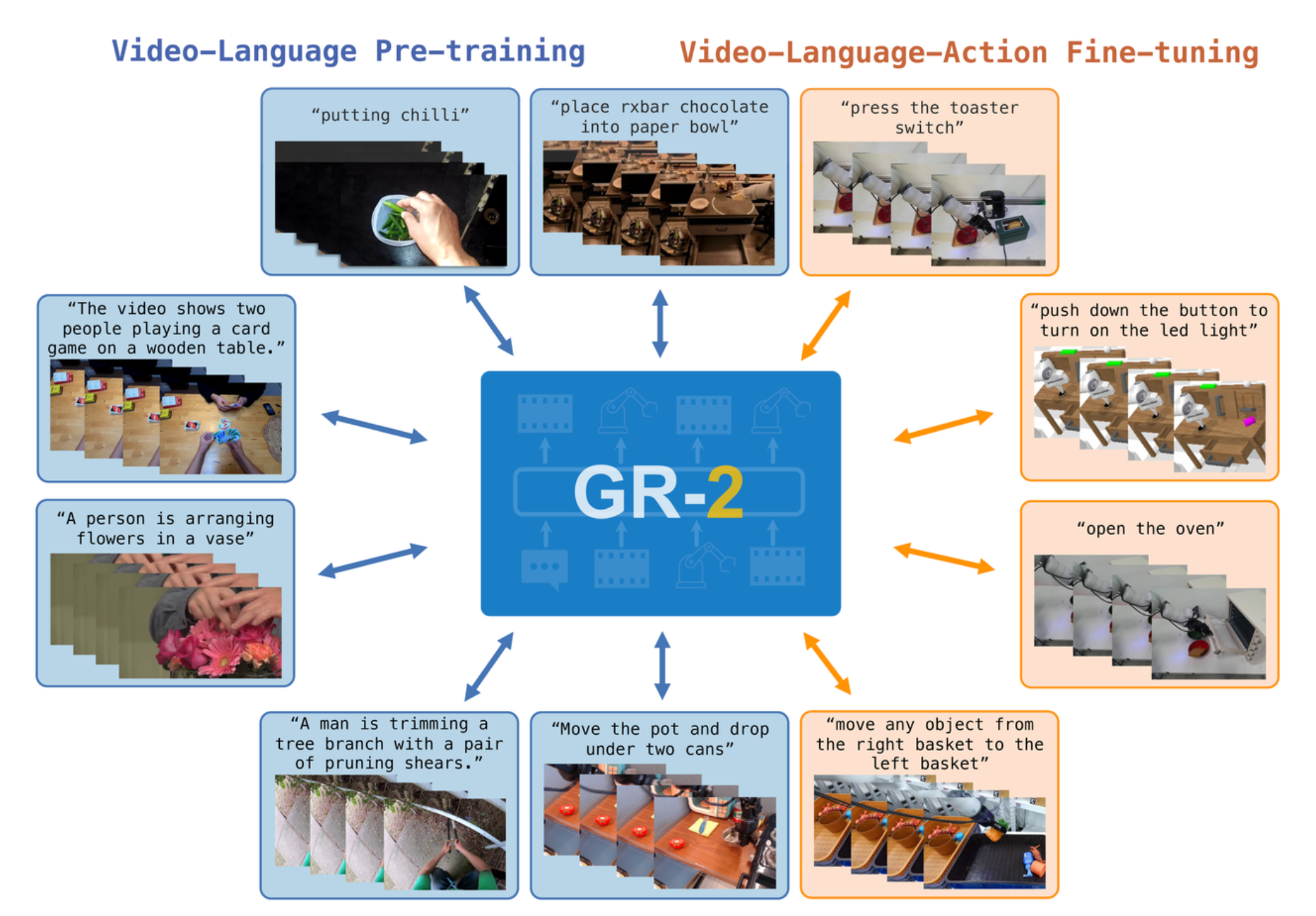
GR-2: A Generative Video-Language-Action Model with Web-Scale Knowledge for Robot Manipulation
Chi-Lam Cheang, Guangzeng Chen, Ya Jing, Tao Kong, Hang Li, Yifeng Li, Yuxiao Liu, Hongtao Wu, Jiafeng Xu, Yichu Yang, Hanbo Zhang, Minzhao Zhu
- GR-2 achieves a 97.7% success rate across 100+ tasks
- GR-2 excels in industrial scenarios like end-to-end picking and adapts well to unseen environments.
State Estimation Transformers for Agile Legged Locomotion
Chen Yu, Yichu Yang, Tianlin Liu, Yangwei You, Mingliang Zhou, Diyun Xiang
- Accepted by IROS 2024
- Best Paper Runner-Up at Deployable@CoRL2023
- The policy was successfully deployed on Cyberdog2, enabling it to execute agile maneuvers such as running jumps, running backflips, and running sideflips
🔍 Research and Projects
 First Product-level Robust Fall-Recovery Ability On All Kinds of Terrains
First Product-level Robust Fall-Recovery Ability On All Kinds of Terrains




Learning Agile Locomotion and Acrobatic Motions


Dog foot contact sensor based on hall effect

💼 Work Experience
- 2024.01 - now, Researcher, Seed Robotics, Bytedance.
- 2022.07 - 2024.01, Researcher, Xiaomi Robotics Lab, Xiaomi.
- 2021.06 - 2022.03, RA, Khoury College of Computer Sciences, Northeastern University.
- 2019.05 - 2019.12, Mechatronics Engineer, Qlibrium (previously CamMed)
📖 Educations
- 2018.09 - 2021.06, Robotics, Khoury College of Computer Sciences, Northeastern University.
- 2014.09 - 2018.06, Mechanical Engineering, Shanghai Jiaotong University.